
- Какво е стъпков двигател?
- Устройство и принцип на работа
- Видове стъпкови двигатели
- Свързване с стъпков двигател
- Управление на стъпков двигател
- Най-простият стъпков двигател на водача го прави сам
- Полезно видео
Помогнете на развитието на сайта, споделяйки статията с приятели!
За да работят практически всички електрически устройства, са необходими специални механизми за задвижване. Предлагаме да се прецени какво е стъпков двигател, неговата конструкция, принцип на работа и електрически схеми.
Какво е стъпков двигател?
Стъпърен двигател е електрическа машина, предназначена да преобразува електрическата енергия на мрежата в механична енергия. Структурно тя се състои от статорни намотки и магнитно мек или магнитно твърд ротор. Отличителна черта на стъпков двигател е дискретно въртене, при което определен брой импулси съответстват на определен брой изпълнени стъпки. Такива устройства са най-широко използвани в CNC машини, роботика, съхранение на информация и устройства за четене.
За разлика от други видове машини, стъпковия двигател не се върти непрекъснато, а на стъпки, от които идва името на устройството. Всяка такава стъпка е само част от общия му оборот. Броят на стъпките, необходими за пълното завъртане на вала, ще се различават в зависимост от схемата на свързване, марката на двигателя и метода на управление.
Предимства и недостатъци на стъпков двигател
Предимствата на работа на стъпков двигател включват:
- В стъпкови двигатели ъгълът на въртене съответства на броя на приложените електрически сигнали, докато след спиране на въртенето се запазва пълният момент и фиксирането;
- Точно позициониране - осигурява 3 - 5% от зададената стъпка, която не се натрупва от стъпка до стъпка;
- Осигурява високоскоростен старт, обратен ход, стоп;
- Отличава се с висока надеждност поради липсата на компоненти за триене за събиране на ток, за разлика от колекторните двигатели;
- За позициониране на стъпковия двигател не се изисква обратна връзка;
- Той може да произвежда ниски обороти за директно натоварване без никакви редуктори;
- Относително по-ниска цена в сравнение със същите сервомотори;
- Осигурява широка гама от обороти на вала за управление на скоростта чрез промяна на честотата на електрическите импулси.
Недостатъците на използването на стъпков двигател са:
- Може да има резонансен ефект и приплъзване на стъпковата единица;
- Съществува възможност за загуба на контрол поради липсата на обратна връзка;
- Количеството консумирана електроенергия не зависи от наличието или отсъствието на товара;
- Сложността на управлението се дължи на конкретната верига
Устройство и принцип на работа
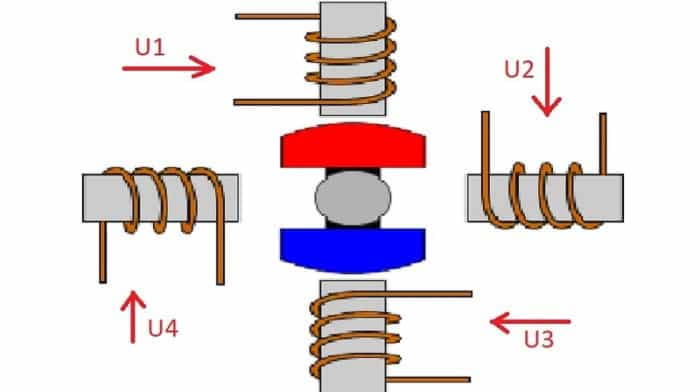
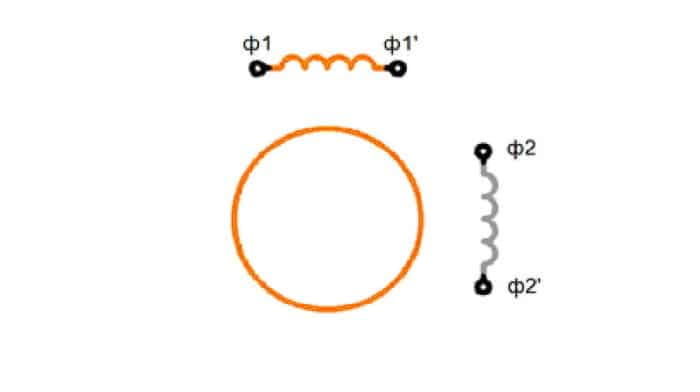
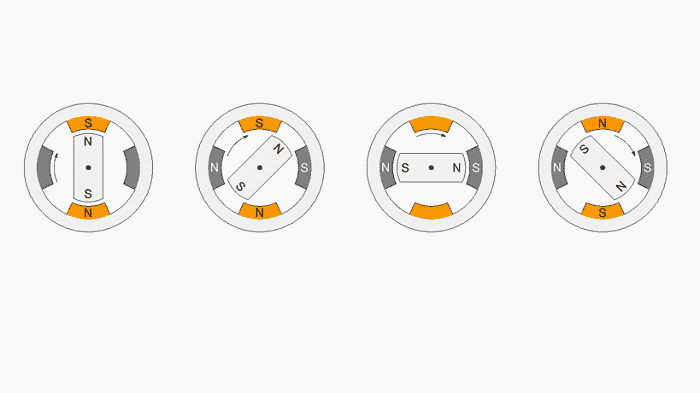
Фигура 1 показва 4 намотки, които се отнасят до статора на двигателя и тяхното разположение е разположено така, че те са под ъгъл 90 ° един спрямо друг. От което следва, че такава машина се характеризира с размер на стъпката от 90 °.
В момента, когато напрежението U1 се подава към първата намотка, роторът се придвижва до същите 90 °. В случай на последователно подаване на напрежение U2, U3, U4 към съответните намотки, валът ще продължи да се върти до завършването на пълния кръг. След което цикълът се повтаря отново. За да се промени посоката на въртене, достатъчно е да се промени реда, в който импулсите се подават към съответните намотки.
Видове стъпкови двигатели
За да се осигурят различни параметри на работа, важни са както размерите на стъпката, по която валът ще се движи, така и моментът на движение. Вариациите на тези параметри се постигат чрез проектирането на самия ротор, метода на свързване и конструкцията на намотките.
С дизайн на ротора
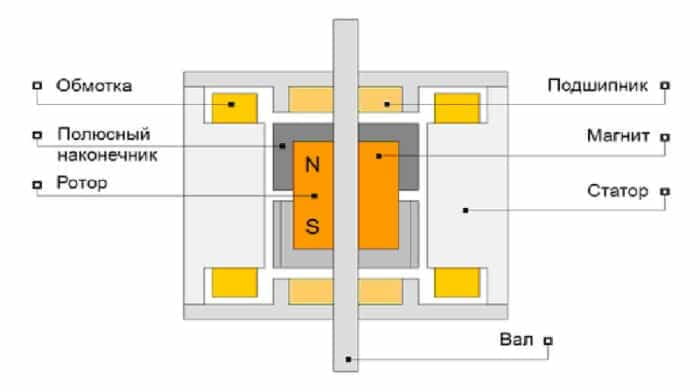
Въртящият елемент осигурява магнитно взаимодействие с електромагнитното поле на статора. Следователно неговите конструктивни и технически характеристики пряко определят режима на работа и параметрите на въртене на стъпковата единица. За да се определи на практика видът на стъпковия двигател, при дезактивирана мрежа е необходимо да се завърти вала, ако се чувствате съпротивление, това показва наличието на магнит, в противен случай това е конструкция без магнитно съпротивление.
струя
Реактивен стъпков двигател не е снабден с магнит върху ротора, а е изработен от меки магнитни сплави, като обикновено се сглобява от плочи за намаляване на индукционните загуби. Дизайнът в напречно сечение прилича на зъбна предавка. Полюсите на статорните намотки се захранват от противоположни двойки и създават магнитна сила за придвижване на ротора, който се движи от променлив поток от електрически ток в намотаните двойки.
Съществено предимство на тази конструкция на стъпковото задвижване е липсата на блокиращ момент, образуван от полето по отношение на закрепването. Всъщност това е същият синхронен двигател, при който роторът се върти в съответствие със статорното поле. Недостатък е намаляването на стойността на въртящия момент. Полето за реактивен двигател варира от 5 до 15 °.
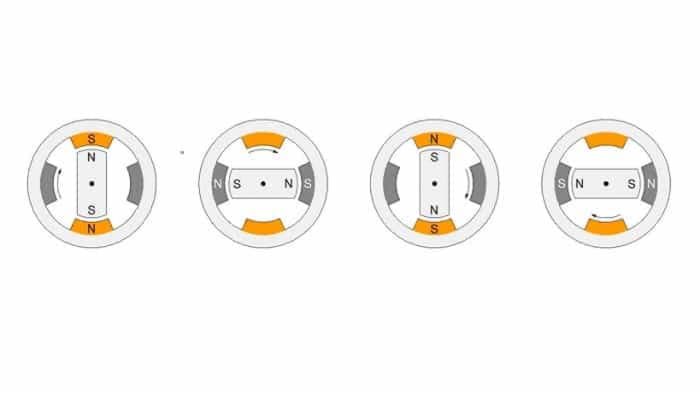
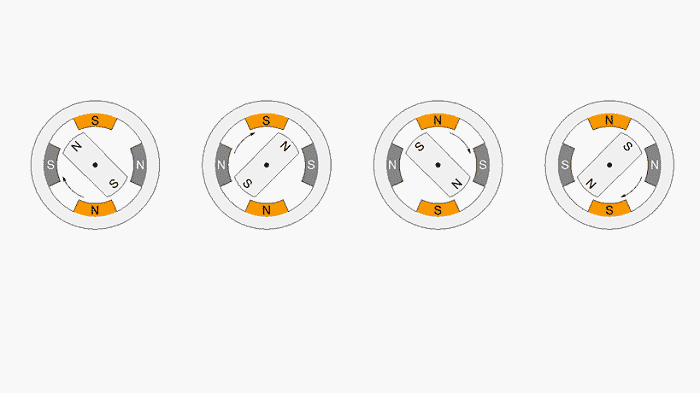
С постоянни магнити
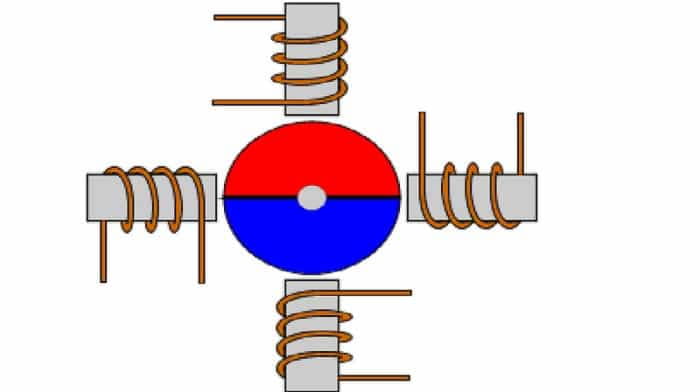
В този случай, подвижният елемент на стъпковия двигател се сглобява от постоянен магнит, в който може да има два или повече полюса. Въртенето на ротора се осигурява от привличането или отблъскването на магнитните полюси от електричното поле, когато напрежението се прилага към съответните намотки. За тази конструкция ъгловата стъпка е 45-90 °.
хибрид
Той е проектиран да съчетава най-добрите качества на предишните два модела, поради което уредът има по-малък ъгъл и височина. Роторът му е направен във формата на цилиндричен постоянен магнит, който е намагнитизиран по надлъжната ос. Структурно тя изглежда като два кръгли полюса, на повърхността на които са роторните зъби на магнитен материал. Това решение позволява отлично задържане и въртящ момент.
Предимствата на хибридния стъпков двигател се състоят в неговата висока точност, гладкост и скорост на движение, на малки стъпки - от 0, 9 до 5 °. Използват се за високотехнологични CNC машини, компютърни и офис устройства и съвременна роботика. Единственият недостатък е относително високата цена.
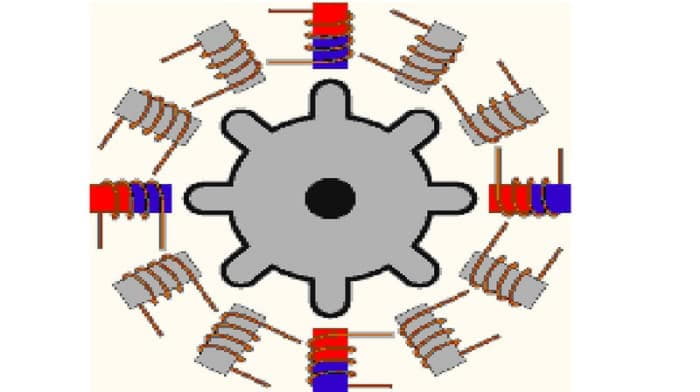
Например, да анализираме варианта на хибридните понижаващи се двигатели с 200 стъпала за позициониране на вала. Съответно, всеки от цилиндрите ще има 50 зъба, единият от които е положителният, вторият е отрицателен. В допълнение, всеки положителен зъб е разположен срещу жлеба в отрицателния цилиндър и обратно. Структурно, изглежда така:
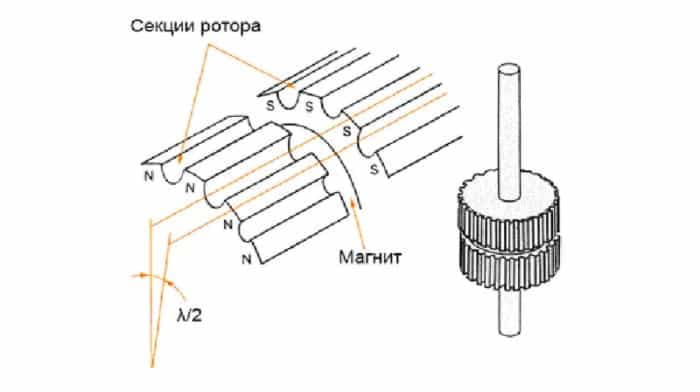
Поради това на вала на стъпков двигател се получават 100 променливи полюса с отлична полярност. Статорът също има зъби, както е показано на фигура 6 по-долу, с изключение на празнините между неговите компоненти.
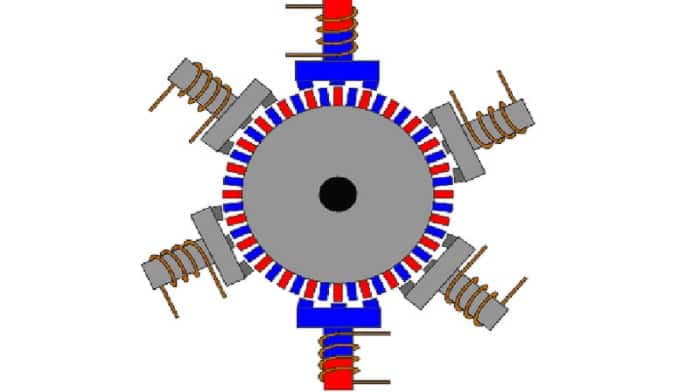
Благодарение на тази конструкция е възможно да се постигне изместване на същия южен полюс спрямо статора в 50 различни положения. Поради разликата в положението на половин позиция между северния и южния полюс се постига възможността за придвижване в 100 позиции, а фазовото изместване с една четвърт от разделянето дава възможност да се увеличи броят на стъпките поради последователно възбуждане с още два пъти, т.е. до 200 стъпки на ъгловия вал на 1 оборот.
Обърнете внимание на Фигура 6, принципът на действие на такъв стъпков двигател се състои в това, че когато двойка ток се подава в противоположните намотки, противоположните ротори на ротора, разположени зад зъбите на статора, се изтеглят нагоре и подобно се повтаря пред тях в посоката на въртене.
По вид намотки
На практика стъпков двигател е многофазен двигател. Гладкостта на работата, в която пряко зависи от броя на намотките - колкото повече от тях, толкова по-гладко въртене, но по-високата цена. В този случай въртящият момент от броя на фазите не се увеличава, въпреки че при нормална експлоатация минималният им брой на статора на електродвигателя трябва да бъде най-малко две. Броят на фазите не определя броя намотки, така че двуфазен стъпков двигател може да има четири или повече намотки.
еднополюсен
Еднополюсен стъпков двигател е различен, тъй като свързващата верига има разклонение от средната точка. Поради това магнитните полюси се променят лесно. Недостатък на тази конструкция е използването само на половината от наличните обороти, поради което се постига по-малък въртящ момент. Следователно те са големи по размер.
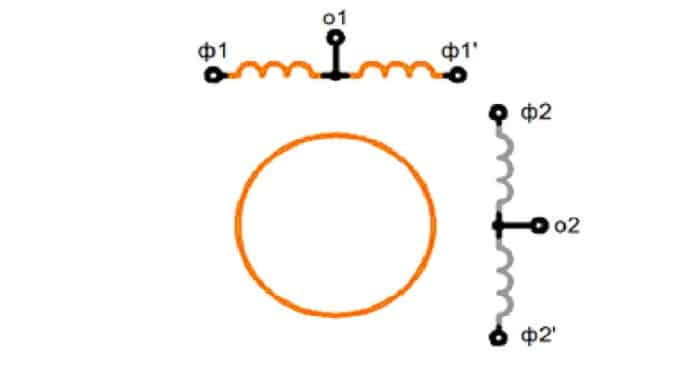
За да се използва цялата мощност на бобината, средният изход остава несвързан. Помислете за дизайна на еднополюсни единици, те могат да съдържат 5 и 6 заключения. Броят им ще зависи от това дали средната жица се отстранява отделно от всяка намотка на двигателя или са свързани заедно.
двуполюсен
Двуполюсният стъпков двигател е свързан към контролера чрез 4 щифта. В този случай намотките могат да бъдат свързани вътре в серията, така и паралелно. Помислете за примера на работата му на фигурата.
В конструктивната схема на такъв двигател, можете да видите с една възбуждаща намотка във всяка фаза. Поради тази причина промяната на посоката на тока изисква използването на специални драйвери в електронната верига (електронни чипове, предназначени за управление). За да постигнете този ефект, можете да използвате включването на H-моста. В сравнение с предишното, биполярното устройство осигурява същия момент с много по-малки размери.
Свързване с стъпков двигател
За захранване на намотките ви е необходимо устройство, което може да произвежда контролен импулс или серия от импулси в определена последователност. Като такива единици действат полупроводникови устройства за свързване на стъпков двигател, микропроцесорни драйвери. При което има набор от изходни терминали, всеки от тях определя метода на мощност и режим на работа.
В зависимост от електрическата схема трябва да се използват една или други заключения на стъпковата единица. При различни начини за сумиране на един или други терминали към изходния DC сигнал се получава определена скорост на въртене, стъпка или микростепен на линейно движение в равнината. Тъй като за някои задачи е необходима ниска честота, а за други висока, същият двигател може да зададе параметър за сметка на водача.
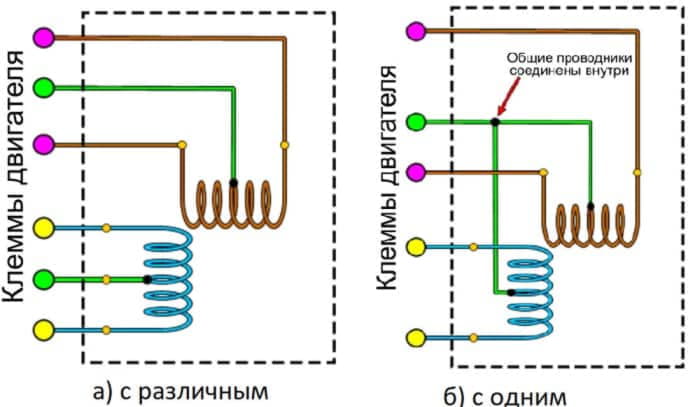
Типични схеми на окабеляване
В зависимост от това колко щифтове са представени на конкретен стъпков двигател: 4, 6 или 8 пина, възможността за използване на една или друга верига за свързването им ще бъде различна.Погледнете снимките, тук са типични опции за свързване на стъпков механизъм:
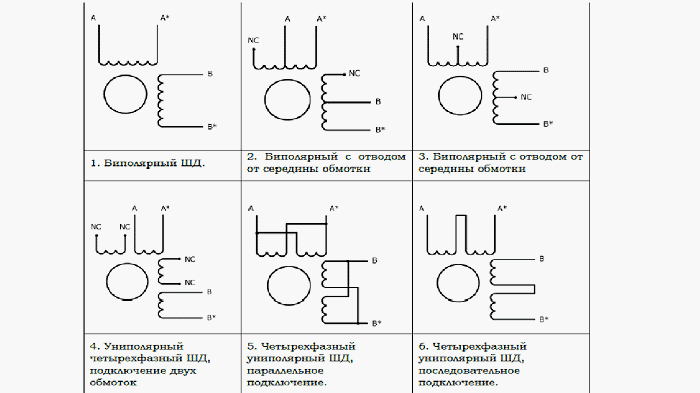
При условията на захранване на главните полюси на стъпкова машина от един и същ водач, съгласно тези схеми, могат да се отбележат следните отличителни черти на работа:
- Кабелите са еднозначно свързани към съответните клеми на устройството. Когато намотките са свързани последователно, индуктивността на намотките се увеличава, но намалява тока.
- Осигурява паспортна стойност на електрическите характеристики. При паралелна верига токът се увеличава и индуктивността намалява.
- Когато се свърже една фаза с намотката, въртящият момент при ниски скорости намалява и намалява големината на токовете.
- Когато е свързан, той изпълнява всички електрически и динамични характеристики според паспорта, номиналните токове. Схемата за контрол е значително опростена.
- Той дава много по-голям момент и се използва за високи скорости;
- Подобно на предишния, той е предназначен да увеличи въртящия момент, но се използва за ниски скорости.
Управление на стъпков двигател
Работата на стъпковото устройство може да се извърши по няколко метода. Всеки от тях се различава по начина, по който сигналите се предават на чифт полюси Общо излъчва метод за активиране на намотките.
Вълна - в този режим се възбужда само една намотка, към която се привличат полюсите на ротора. В този случай, стъпковия двигател не е в състояние да издърпа голям товар, тъй като издава само половината от момента.
Пълна стъпка - в този режим се извършва едновременно превключване на фазите, т.е. и двете се възбуждат наведнъж. Поради това се осигурява максимален момент, в случай на паралелно свързване или серийно свързване на намотките се създава максимално напрежение или ток.
Half - step - е комбинация от двата предишни метода за превключване на намотките. По време на изпълнението на които в стъпков двигател, се прилага променливо напрежение първо към една намотка и след това към две наведнъж. Това осигурява по-добро фиксиране при максимални скорости и повече стъпки.
За по-мек контрол и за преодоляване на инерцията на ротора се използва микро-стъпково управление, когато синусоидалният сигнал се осъществява чрез микро стъпкови импулси. Благодарение на което силите на взаимодействие на магнитните вериги в стъпков двигател получават по-гладка промяна и в резултат на това движението на ротора между полюсите. Позволява значително да намалите ритмичен стъпков двигател.
Без контролер
За контрол на безчеткови двигатели се използва H-мостова система. Което ви позволява да превключвате полярността за обратен стъпков двигател. Тя може да бъде изпълнена на транзистори или микрочипове, които създават логическа верига за преместване на ключове.
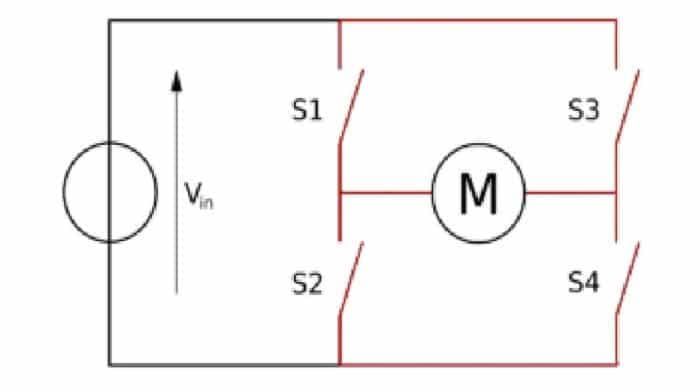
Както можете да видите, от захранващия източник V напрежението се прилага към моста. Когато се свържат контактите S1 - S4 или S3 - S2, токът ще тече през намотките на двигателя. Което ще доведе до въртене в една или друга посока.
С контролер
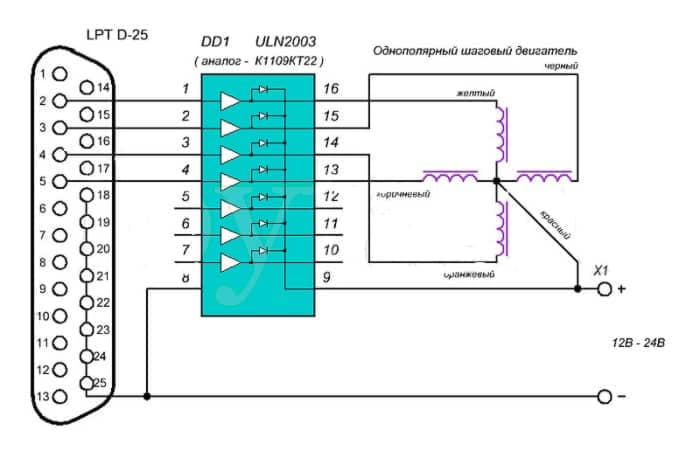
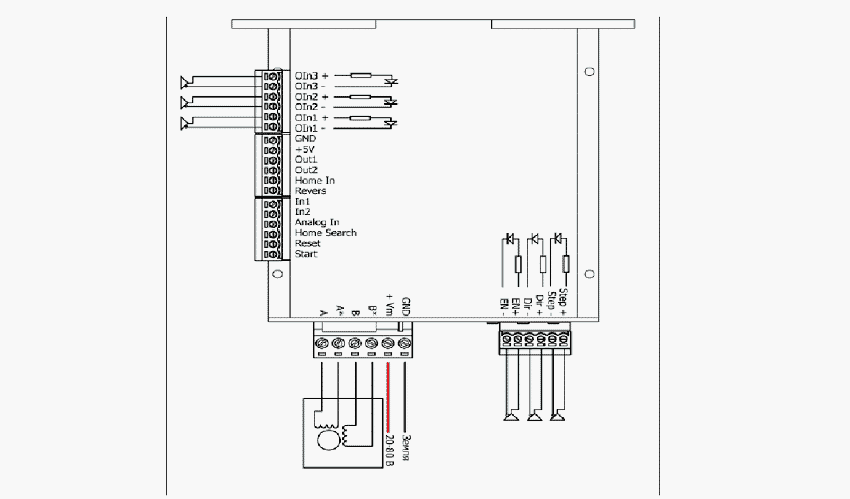
Контролерът позволява управление на стъпковия двигател в различни режими. Контролерът се базира на електронно устройство, което формира групи сигнали и тяхната последователност, изпратени до рулоните на статора. За да се предотврати възможността от повреда в случай на късо съединение или друга аварийна ситуация на самия двигател, всеки изход е защитен от диод, който не пропуска импулса в обратна посока.
Популярни схеми за контрол на SM
Това е един от най-безвредните методи на работа. В този случай директният и обратният сигнал е директно свързан със съответните полюси. В такава схема трябва да се прилага защитен проводник на сигнала. Идеален за ниско енергийни товари.

В тази схема положителните входове на контролера са свързани, които са свързани с положителния полюс. В случай на мощност над 9V, в веригата трябва да се включи специален резистор за ограничаване на тока. Тя ви позволява да зададете необходимия брой стъпки със строго определена скорост, да определите ускорението и т.н.
Най-простият стъпков двигател на водача го прави сам
За да се събере шофьорска схема у дома, някои елементи от стари принтери, компютри и друго оборудване могат да бъдат полезни. Вие ще трябва транзистори, диоди, резистори (R) и микросхема (RG).
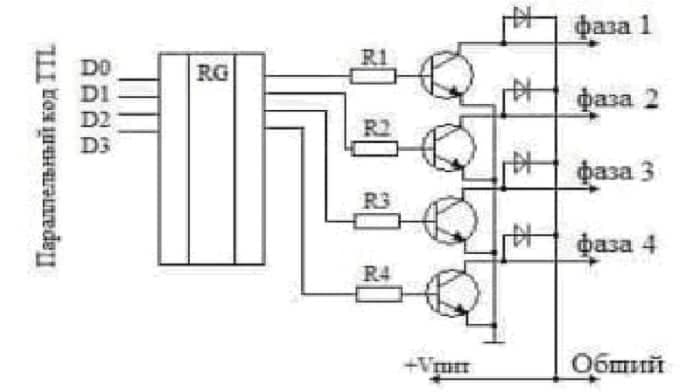
За да се изгради програма, се ръководи от следния принцип: при прилагане на логическа единица към един от D пина (останалите сигнални нули), транзисторът се отваря и сигналът преминава към моторната бобина. По този начин се извършва една стъпка.
Въз основа на схемата се съставя печатна платка, която можете да опитате да направите сами или да поръчате. След това съответните дъски се запояват на дъската. Устройството е в състояние да контролира стъпковото устройство от домашния компютър чрез свързване към обикновен USB порт.